Vendredi dernier, nous avons participé à la seconde journée de rencontre avec les planétologues de Grenoble (IPAG). Ces réunions ont pour but de renforcer la dynamique de collaboration qui existe déjà entre nos deux laboratoires. La première journée avait eu lieu en janvier à Lyon et avait permis de commencer la réflexion sur les thématiques communes pouvant profiter de ces échanges.
Au programme de cette seconde journée, qui s’est cette fois déroulée à Grenoble, du SIG et du MNT! Durant la première partie de la réunion, nous avons pu discuter de la mise en place d’outils permettant la gestion des données planétaires, notamment du point de vue de la chaîne de traitements des données hyperspectrales et de la mise en place d’un SIG martien. Nous avons également abordé la partie webmapping qui est une composante prévue dans le projet initial d’e-Mars. Ces aspects nécessiteront toutefois d’autres réunions plus spécifiques, en particulier avec le futur ingénieur e-Mars. L’après-midi a été consacré à l’explication de la chaîne stéréo-photogrammétrique par P. Allemand (LGL). Cette chaîne de traitements permet de réaliser des MNT à haute résolution à partir d’images CTX, HiRISE ou HRSC. Ces MNT sont particulièrement intéressants dans le cas d’études géologiques locales ou pour des analyses photométriques. Vous pouvez voir un exemple de résultat sur la figure ci-dessous.
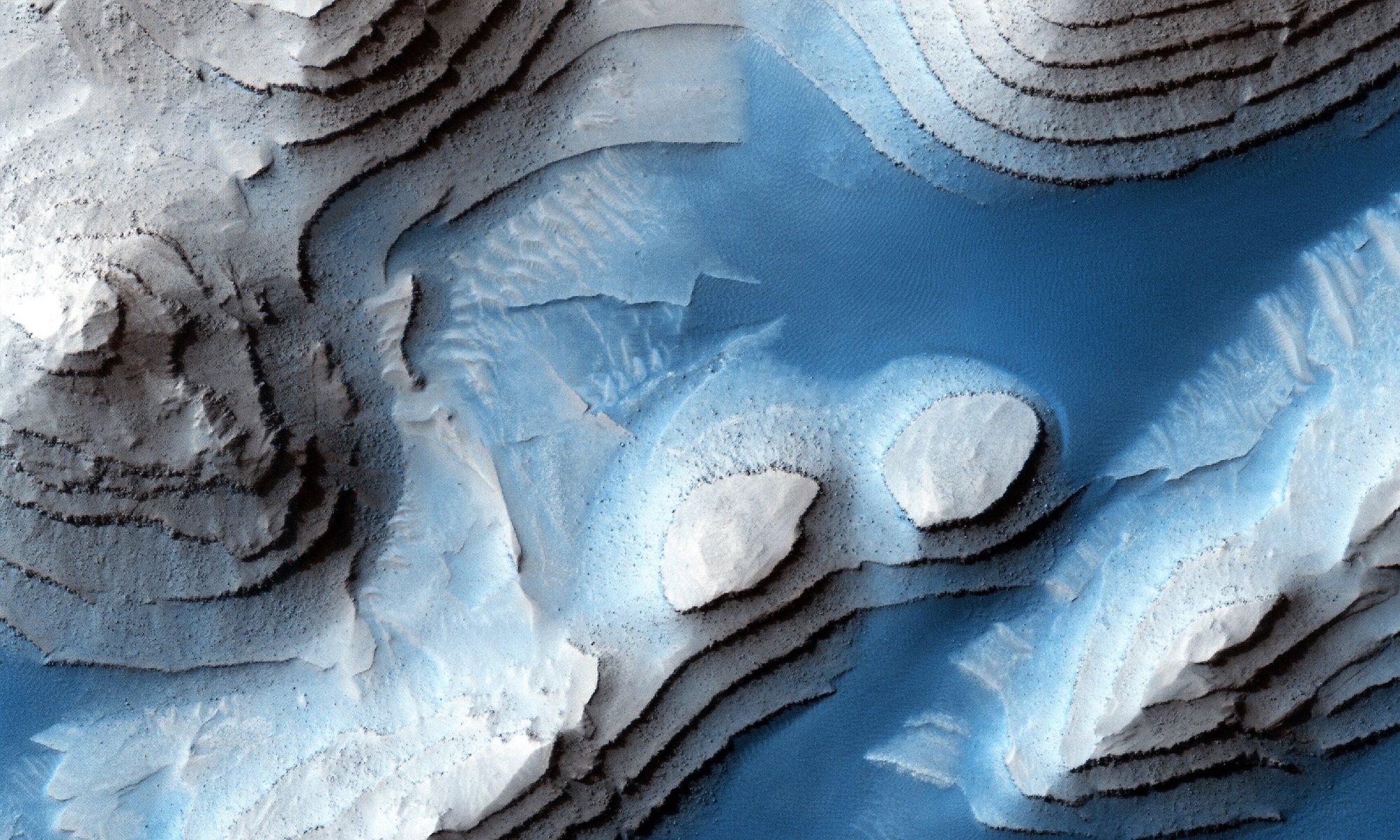
Exemple de résultats de MNT produits à partir d'images CTX
Cette seconde journée fut donc très fructueuse pour les deux laboratoires. La prochaine réunion aura lieu fin mars et aura pour thème le traitement des données hyperspectrales OMEGA/CRISM.
Et en cadeau bonus, une photo prise en fin de journée. On peut y voir quatre des protagonistes de cette journée dans la superbe salle de réunion de l’IPAG (on ne les voit pas sur la photo mais deux petites maquettes de sondes spatiales sont accrochées au plafond et égaient la pièce!).
C. Quantin (LGL), S. Douté (IPAG), E. Lewin (ISTerre), P. Beck (IPAG)
Le choix d’un site d’atterrissage pour un (futur) rover martien est particulièrement complexe. Celui-ci doit en effet présenter à la fois un intérêt maximum du point de vue scientifique (diversité des terrains, compositions et caractéristiques morphologiques de chacune des unités, habitabilité pour le développement et la conservation de matériel organique,…) et présenter des « caractéristiques raisonnables » en termes de potentiel d’atterrissage. L’objet de ce billet sera de détailler un peu ces « caractéristiques raisonnables »!
Tout d’abord, avant d’entamer une description des contraintes qui sont fixées avant le choix scientifique, il faut comprendre le processus d’atterrissage. Les futurs rovers martiens utiliseront le même système (sinon mieux!) que celui qui a été utilisé sur le rover Curiosity. Après la première phase de freinage atmosphérique grâce au parachute, un système de propulsion prend le relais pour contrôler la descente finale. En parallèle, un système radar étudie en temps réel le relief du terrain afin de pouvoir décaler le rover en cas de danger important (présence d’un gros bloc par exemple). Finalement, le rover est descendu par des filins et se pose en douceur à la surface (système du « sky crane »). Le module de descente poursuit son vol plus loin afin de ne pas endommager le rover.
Représentation du processus d'atterrissage de MSL (NASA)
Qu’est ce que tout cela implique alors en termes de contraintes pour le choix du site d’atterrissage? La première énoncée dans le modèle de document utilisé pour soumettre un résumé (voir aussi ce billet) concerne plutôt la première phase de la descente. Cette contrainte est en effet liée à l’altitude du site d’atterrissage. Celui-ci doit se situer au dessous du niveau de référence (altitude 0km) par rapport à l’ellipsoïde MOLA. Une altitude trop élevée entraînerait en effet un temps de descente plus court, insuffisant pour que le parachute puisse suffisamment freiner l’engin. La latitude du site doit également être à moins de 30° de l’équateur.
Vue d'artiste de MSL en phase finale de descente (NASA)
Les paramètres suivants concernent plutôt la nature de la surface sur laquelle le rover va se poser. Il faut noter que la position approximative de l’atterrissage peut être estimée, mais il existe toujours une petite incertitude. C’est pourquoi nous parlerons d’ellipse d’atterrissage. Dans le cas d’un système identique à celui de MSL, cette ellipse a une dimension de 25 x 20km. Les paramètres de surface à considérer sont alors :
des pentes de moins de 20° sur une distance de 2 à 10km de l’ellipse pour éviter une malfonction du radar de descente;
moins de 100m de relief à une distance de 1 à 1000m de l’ellipse pour contrôler correctement le processus de descente et la consommation énergétique du module propulseur;
des pentes inférieures à 25-30°, à une échelle de 2 à 5m à l’intérieur de l’ellipse, pour assurer la stabilité et la mobilité du rover pendant et après l’atterrissage;
la probabilité qu’un rocher plus grand que 55cm soit présent dans une aire de 4m² doit être de moins de 0.5%, bien évidemment pour permettre au « sky crane » d’éviter ce bloc, même au dernier moment, sans se prendre le suivant sur le coin du nez;
la bande radar Ka (plage de fréquence du radar 27-40GHZ / 0.75-1.11cm) doit être comprise entre -20 et 15dB afin d’assurer une mesure correcte de l’altitude et de la vitesse par le radar de descente;
la surface doit avoir une inertie thermique plus grande que 100J.m-2s-0.5K-1, un albédo plus faible que 0.25 et une réflectivité au ondes radar supérieure à 0.01 afin d’être sur qu’il s’agisse d’un sol dur capable de supporter la charge du rover plutôt que de la poussière non consolidée
Il apparaît que choisir un site d’atterrissage favorable n’est pas si facile que cela. Néanmoins, des améliorations sont en cours d’études. Ainsi, il est possible que des technologies d’évitement de danger soient incluses dans le module finale. Cela réduirait les contraintes sur les pentes : il pourrait par exemple exister une petite zone (>600m) avec des blocs rocheux de taille importante dans l’ellipse d’atterrissage.
Voila les contraintes que nous devons prendre en compte lors du positionnement de l’ellipse. Comme vous pouvez le constater, le sites les plus intéressants ne seront pas forcément ceux choisis pour les futurs rovers. Il est en effet préférable d’avoir un rover en état de marche dans un endroit un peu moins intéressant que pas de rover du tout!