Après plusieurs mois de conception, le projet de serveur massif de stockage de données prend forme. Un bébé de 80 To utiles nous a été livré cette semaine! Concrètement, il s’agit d’un empilement de disques de 1 ou 2 To et sa gestion sera réalisée par Loïc, notre ingénieur e-Mars. Loïc, ENJOY! Il ne nous reste plus qu’à le remplir mais ça ne devrait pas être très long…
Arrivée de Loïc Lozac’h au poste d’ingénieur
L’ingénieur qui s’occupera de la gestion des données planétaires au sein du projet e-Mars est arrivé. Il s’agit de Loïc Lozac’h.

Premières étapes pour rentrer dans le projet : comprendre les données, interpréter les objectifs (parfois complexes!) du reste de l’équipe et attaquer le code… L’arrivée du serveur est prévue autour de mi-mai. Beaucoup de travail en perspective!
En tout cas, bienvenue à Loïc!
« FAST », le nouveau système de commande de Mars Express
En août 2011, le système de commande « SSMM » (pour « Solid-State Mass Memory ») de la sonde européenne Mars Express a connu un problème majeur. Suite à cela, il a été décidé le 16 octobre 2011 d’arrêter les observations scientifiques. La sonde a alors été mise en mode de sécurité afin d’éviter de consommer inutilement du propergol.
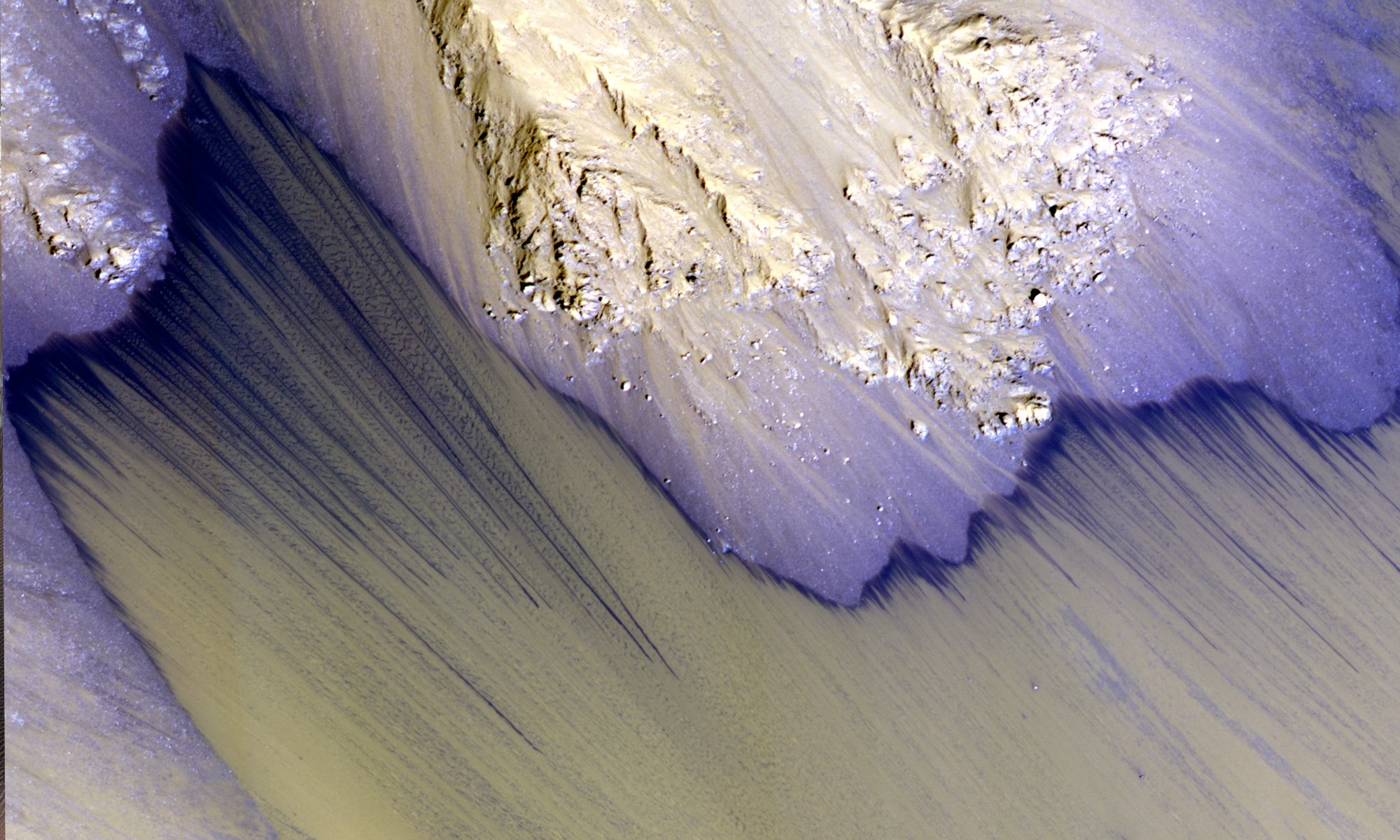
Depuis cette date, les ingénieurs de l’ESA ont pu trouver une solution au problème en remplaçant le système de commande original par un nouveau système. Celui-ci est nommé « FAST » pour « File Activities on Short Timeline ». Vous pouvez trouver des informations techniques dans le communiqué de presse de l’ESA daté du 15 février 2012 (lien en anglais). La sonde Mars Express est donc de nouveau pleinement fonctionnelle et recommence l’acquisition de données. Pour preuve, l’image HRSC ci-dessous obtenue avec le système « FAST ».

Contraintes « ingénieurs » pour la sélection d’un site d’atterrissage
Le choix d’un site d’atterrissage pour un (futur) rover martien est particulièrement complexe. Celui-ci doit en effet présenter à la fois un intérêt maximum du point de vue scientifique (diversité des terrains, compositions et caractéristiques morphologiques de chacune des unités, habitabilité pour le développement et la conservation de matériel organique,…) et présenter des « caractéristiques raisonnables » en termes de potentiel d’atterrissage. L’objet de ce billet sera de détailler un peu ces « caractéristiques raisonnables »!
Tout d’abord, avant d’entamer une description des contraintes qui sont fixées avant le choix scientifique, il faut comprendre le processus d’atterrissage. Les futurs rovers martiens utiliseront le même système (sinon mieux!) que celui qui a été utilisé sur le rover Curiosity. Après la première phase de freinage atmosphérique grâce au parachute, un système de propulsion prend le relais pour contrôler la descente finale. En parallèle, un système radar étudie en temps réel le relief du terrain afin de pouvoir décaler le rover en cas de danger important (présence d’un gros bloc par exemple). Finalement, le rover est descendu par des filins et se pose en douceur à la surface (système du « sky crane »). Le module de descente poursuit son vol plus loin afin de ne pas endommager le rover.

Qu’est ce que tout cela implique alors en termes de contraintes pour le choix du site d’atterrissage? La première énoncée dans le modèle de document utilisé pour soumettre un résumé (voir aussi ce billet) concerne plutôt la première phase de la descente. Cette contrainte est en effet liée à l’altitude du site d’atterrissage. Celui-ci doit se situer au dessous du niveau de référence (altitude 0km) par rapport à l’ellipsoïde MOLA. Une altitude trop élevée entraînerait en effet un temps de descente plus court, insuffisant pour que le parachute puisse suffisamment freiner l’engin. La latitude du site doit également être à moins de 30° de l’équateur.

Les paramètres suivants concernent plutôt la nature de la surface sur laquelle le rover va se poser. Il faut noter que la position approximative de l’atterrissage peut être estimée, mais il existe toujours une petite incertitude. C’est pourquoi nous parlerons d’ellipse d’atterrissage. Dans le cas d’un système identique à celui de MSL, cette ellipse a une dimension de 25 x 20km. Les paramètres de surface à considérer sont alors :
- des pentes de moins de 20° sur une distance de 2 à 10km de l’ellipse pour éviter une malfonction du radar de descente;
- moins de 100m de relief à une distance de 1 à 1000m de l’ellipse pour contrôler correctement le processus de descente et la consommation énergétique du module propulseur;
- des pentes inférieures à 25-30°, à une échelle de 2 à 5m à l’intérieur de l’ellipse, pour assurer la stabilité et la mobilité du rover pendant et après l’atterrissage;
- la probabilité qu’un rocher plus grand que 55cm soit présent dans une aire de 4m² doit être de moins de 0.5%, bien évidemment pour permettre au « sky crane » d’éviter ce bloc, même au dernier moment, sans se prendre le suivant sur le coin du nez;
- la bande radar Ka (plage de fréquence du radar 27-40GHZ / 0.75-1.11cm) doit être comprise entre -20 et 15dB afin d’assurer une mesure correcte de l’altitude et de la vitesse par le radar de descente;
- la surface doit avoir une inertie thermique plus grande que 100J.m-2s-0.5K-1, un albédo plus faible que 0.25 et une réflectivité au ondes radar supérieure à 0.01 afin d’être sur qu’il s’agisse d’un sol dur capable de supporter la charge du rover plutôt que de la poussière non consolidée
Il apparaît que choisir un site d’atterrissage favorable n’est pas si facile que cela. Néanmoins, des améliorations sont en cours d’études. Ainsi, il est possible que des technologies d’évitement de danger soient incluses dans le module finale. Cela réduirait les contraintes sur les pentes : il pourrait par exemple exister une petite zone (>600m) avec des blocs rocheux de taille importante dans l’ellipse d’atterrissage.
Voila les contraintes que nous devons prendre en compte lors du positionnement de l’ellipse. Comme vous pouvez le constater, le sites les plus intéressants ne seront pas forcément ceux choisis pour les futurs rovers. Il est en effet préférable d’avoir un rover en état de marche dans un endroit un peu moins intéressant que pas de rover du tout!
