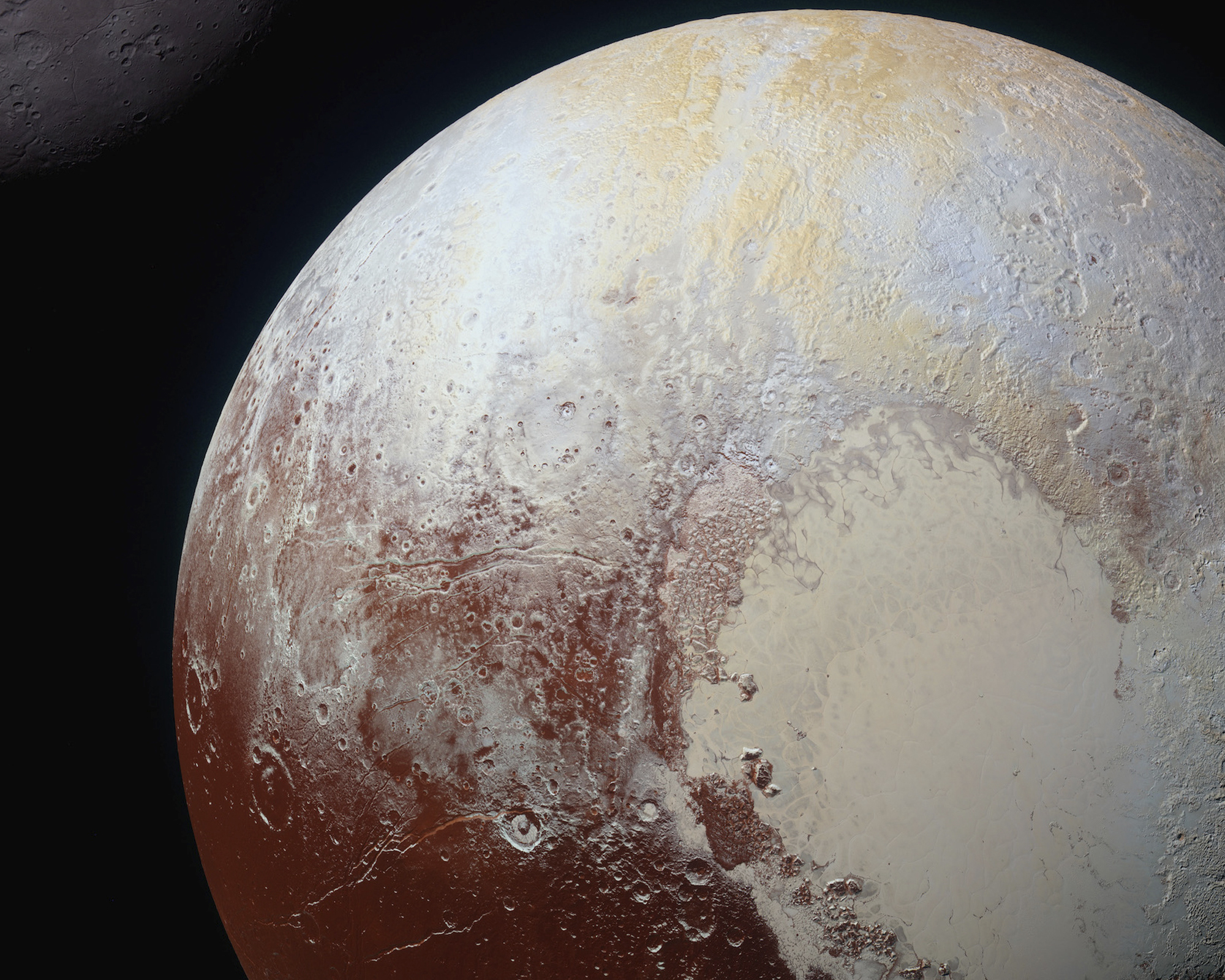
La Meteoritical Society a publié hier une annonce concernant le référencement d’une nouvelle météorite martienne : la météorite de Tissint. Cette météorite est tombée en 2011 au Maroc et le poids total des fragments retrouvés s’élève à 7kg.
Le bulletin nous indique les caractéristiques de cette météorite, la rangeant dans la catégorie des Shergottite (olivine-phyric shergottite). Les principaux minéraux présents sont : olivine (coeur des cristaux de composition Fa20 à Fa30 tandis que les bordures ont une composition comprise entre Fa43 et Fa60), orthopyroxène (Fs24Wo4), pigeonite (Fs26 à Fs51 et Wo12 à Wo17), augite (Fs22Wo25) et plagioclase (An63Or0.5).
Cette météorite est intéressante en raison du volume d’échantillon récupéré et en raison de son état de fraicheur, comme on peut le constater sur la photo ci-dessus. Pour continuer à avoir des informations, notamment les analyses géochimiques concernant la datation, il faudra attendre les prochaines publications. Et comme tout bon spectroscopiste, je terminerais en rajoutant : vivement les spectres!
Aujourd’hui, c’était la deadline pour soumettre un résumé à l’European Geosciences Union General Assembly (EGU) qui se déroulera du 22 au 27 avril à Vienne (Autriche). Le PI de l’équipe e-Mars, Cathy Quantin, a soumis un résumé intitulé « Age and erosion rates of sulfate-rich Interior Layered Deposits of Valles Marineris ». Le lien vers le pdf dès que celui-ci est en ligne sur les serveurs.
Il est à noter que les membres de l’équipe e-Mars sont également co-auteurs d’un autre abstract, soumis par Pascal Allemand qui est membre de l’équipe de planétologie du LGL. Celui-ci s’intitule « Magma rheology from 3D geometry of martian lava flows ».
Mercredi, le 11 janvier donc, c’était l’anniversaire de la naissance de Nicolas Steno (ou Sténon en français, Niels Stensen de son vrai nom). Un rapide parcours de la page Wikipédia vous permettra d’apprendre (si ce n’était déjà fait bien sur!) que cet évêque danois était également géologue. Parmi les grands principes de la géologie, Steno a entre autres énoncé celui de la superposition. Je ne vais pas détailler cela ici, de nombreuses pages le fond déjà…
Je vais donc plutôt profiter de ce billet pour partager un article issu du blog de la Planetary Society*, blog tenu par Emily Lakdawalla. L’article « Steno’s principles and planetary geology* » replace les principes énoncés par Steno dans le contexte de l’exploration planétaire. Bonne lecture!
Hier, c’était la deadline pour soumettre un résumé à la Lunar and Planetary Science Conference (LPSC) qui se déroulera à Houston (USA) en mars. L’équipe e-Mars a soumis un résumé intitulé « Crustal composition in the vicinity of Valles Marineris, Mars, as seen from the central peaks of impact craters ». Le lien vers le pdf dès que celui-ci est en ligne sur les serveurs du LPI.
Le choix d’un site d’atterrissage pour un (futur) rover martien est particulièrement complexe. Celui-ci doit en effet présenter à la fois un intérêt maximum du point de vue scientifique (diversité des terrains, compositions et caractéristiques morphologiques de chacune des unités, habitabilité pour le développement et la conservation de matériel organique,…) et présenter des « caractéristiques raisonnables » en termes de potentiel d’atterrissage. L’objet de ce billet sera de détailler un peu ces « caractéristiques raisonnables »!
Tout d’abord, avant d’entamer une description des contraintes qui sont fixées avant le choix scientifique, il faut comprendre le processus d’atterrissage. Les futurs rovers martiens utiliseront le même système (sinon mieux!) que celui qui a été utilisé sur le rover Curiosity. Après la première phase de freinage atmosphérique grâce au parachute, un système de propulsion prend le relais pour contrôler la descente finale. En parallèle, un système radar étudie en temps réel le relief du terrain afin de pouvoir décaler le rover en cas de danger important (présence d’un gros bloc par exemple). Finalement, le rover est descendu par des filins et se pose en douceur à la surface (système du « sky crane »). Le module de descente poursuit son vol plus loin afin de ne pas endommager le rover.
Représentation du processus d'atterrissage de MSL (NASA)
Qu’est ce que tout cela implique alors en termes de contraintes pour le choix du site d’atterrissage? La première énoncée dans le modèle de document utilisé pour soumettre un résumé (voir aussi ce billet) concerne plutôt la première phase de la descente. Cette contrainte est en effet liée à l’altitude du site d’atterrissage. Celui-ci doit se situer au dessous du niveau de référence (altitude 0km) par rapport à l’ellipsoïde MOLA. Une altitude trop élevée entraînerait en effet un temps de descente plus court, insuffisant pour que le parachute puisse suffisamment freiner l’engin. La latitude du site doit également être à moins de 30° de l’équateur.
Vue d'artiste de MSL en phase finale de descente (NASA)
Les paramètres suivants concernent plutôt la nature de la surface sur laquelle le rover va se poser. Il faut noter que la position approximative de l’atterrissage peut être estimée, mais il existe toujours une petite incertitude. C’est pourquoi nous parlerons d’ellipse d’atterrissage. Dans le cas d’un système identique à celui de MSL, cette ellipse a une dimension de 25 x 20km. Les paramètres de surface à considérer sont alors :
des pentes de moins de 20° sur une distance de 2 à 10km de l’ellipse pour éviter une malfonction du radar de descente;
moins de 100m de relief à une distance de 1 à 1000m de l’ellipse pour contrôler correctement le processus de descente et la consommation énergétique du module propulseur;
des pentes inférieures à 25-30°, à une échelle de 2 à 5m à l’intérieur de l’ellipse, pour assurer la stabilité et la mobilité du rover pendant et après l’atterrissage;
la probabilité qu’un rocher plus grand que 55cm soit présent dans une aire de 4m² doit être de moins de 0.5%, bien évidemment pour permettre au « sky crane » d’éviter ce bloc, même au dernier moment, sans se prendre le suivant sur le coin du nez;
la bande radar Ka (plage de fréquence du radar 27-40GHZ / 0.75-1.11cm) doit être comprise entre -20 et 15dB afin d’assurer une mesure correcte de l’altitude et de la vitesse par le radar de descente;
la surface doit avoir une inertie thermique plus grande que 100J.m-2s-0.5K-1, un albédo plus faible que 0.25 et une réflectivité au ondes radar supérieure à 0.01 afin d’être sur qu’il s’agisse d’un sol dur capable de supporter la charge du rover plutôt que de la poussière non consolidée
Il apparaît que choisir un site d’atterrissage favorable n’est pas si facile que cela. Néanmoins, des améliorations sont en cours d’études. Ainsi, il est possible que des technologies d’évitement de danger soient incluses dans le module finale. Cela réduirait les contraintes sur les pentes : il pourrait par exemple exister une petite zone (>600m) avec des blocs rocheux de taille importante dans l’ellipse d’atterrissage.
Voila les contraintes que nous devons prendre en compte lors du positionnement de l’ellipse. Comme vous pouvez le constater, le sites les plus intéressants ne seront pas forcément ceux choisis pour les futurs rovers. Il est en effet préférable d’avoir un rover en état de marche dans un endroit un peu moins intéressant que pas de rover du tout!
Vendredi dernier est arrivé le premier portable de l’équipe e-Mars! Voilà le premier cadeau de Noël de l’année. Et pour bien faire, c’est celui du PI! Ouf! Les sauvegardes sont faites, les programmes installés, plus qu’à traiter des données…
Photo du portable
Et pour vous donner une brève idée du matériel avec lequel on travaille, voici les caractéristiques principales :
Processeur : i7-2720QM (2.2GHz, 6Mo de cache, quadri coeur)
RAM : 8Go de DDR3
Carte graphique : NVidia Quadro NVS 4200M (512Mo)
Disque dur : 500Go (7200 tr/min)
Plus qu’à réceptionner le second portable et attendre la commande de la station de stockage des données…
Je viens de commencer un nouveau bouquin : « Nos rêves sont plus grands que le ciel », de Jean Cavé (Ed. Plon).
Cela n’a a priori aucune importance. Excepté qu’il s’agit d’un livre sur Mars. Enfin, plutôt sur l’astronome Percival Lowell (1855-1916), ardent défenseur de la thèse des canaux martiens et fondateur de l’observatoire de Flagstaff.
Je programme un petit compte-rendu dès que j’ai fini l’ouvrage!
Carte des canaux martiens de P. Lowell - Source Wikipedia
Un appel à projet avait été lancé par le comité international « Mars Landing Site steering Committee ». Celui-ci avait pour but de définir de nouvelles zones scientifiquement intéressantes sur lesquelles un futur rover pourrait aller échantillonner. La deadline pour proposer des nouvelles cibles à observer grâce à MRO était hier soir. Vous pouvez aller jeter un coup d’œil à nos résumés!
Et la première news qui ouvrira ce blog sera consacré au décollage réussi du rover Mars Science Laboratory (MSL ou Curiosity pour les intimes) à bord d’une fusée Atlas V. Vous pouvez voir (ou revoir) la vidéo du décollage :