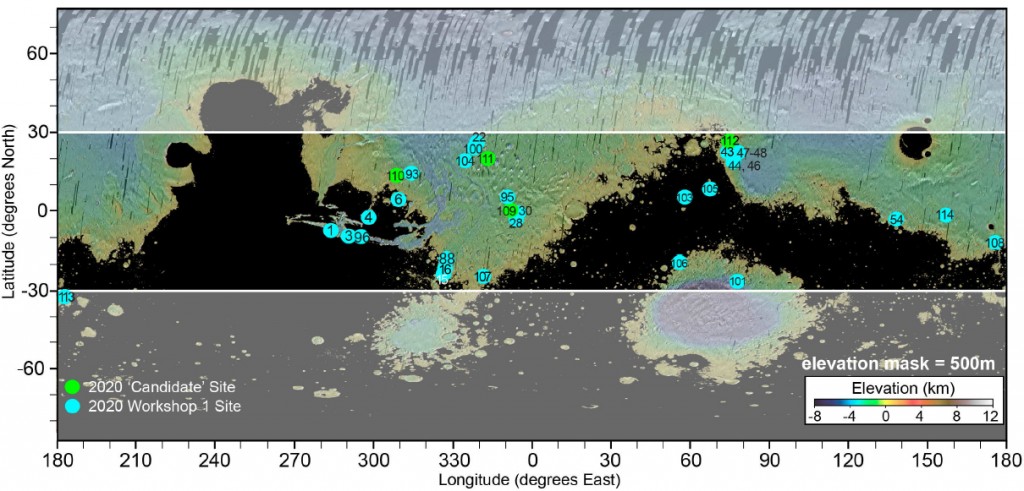
En 2018, la plaine d’Oxia Planum, dans la région d’Oxia, était sélectionnée comme site d’atterrissage de la mission d’investigation du rover « Rosalind Franklin »/Exomars (ESA). Cette mission d’exobiologie hors normes a un lancement prévu pour 2028.
Une des étapes suivantes de la missions était l’organisation par l’ESA d’un groupe de travail pour la création d’une carte de la géologie à haute résolution. Si les études de sélection de sites avait montré l’intérêt de la région, il s’agit désormais d’avoir une connaissance approfondie des types de sols présentés afin que, une fois arrivé, le rover Rosalind Franklin puisse être guidé vers les zones d’intérêt les plus proches (et les plus sûres).
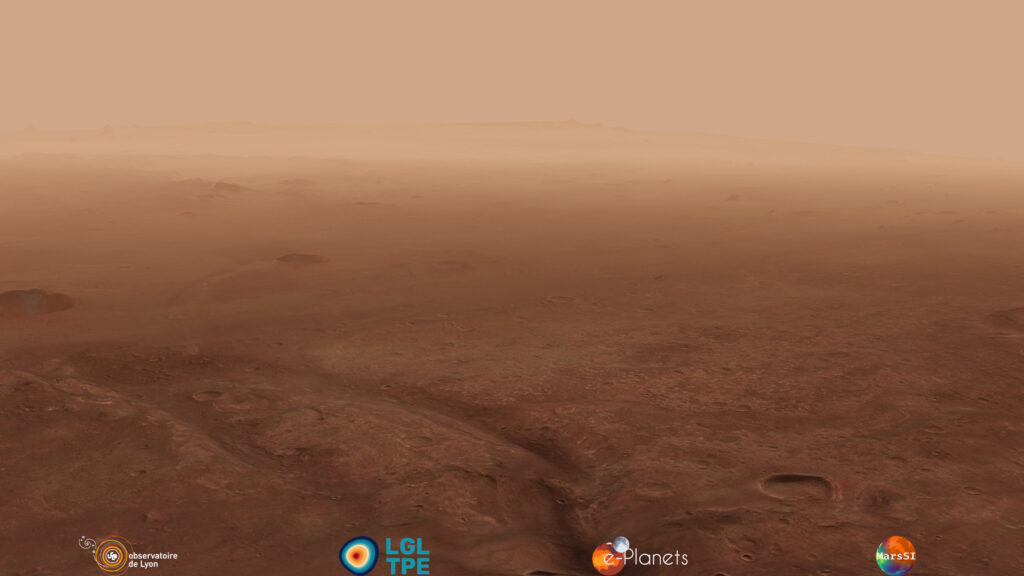
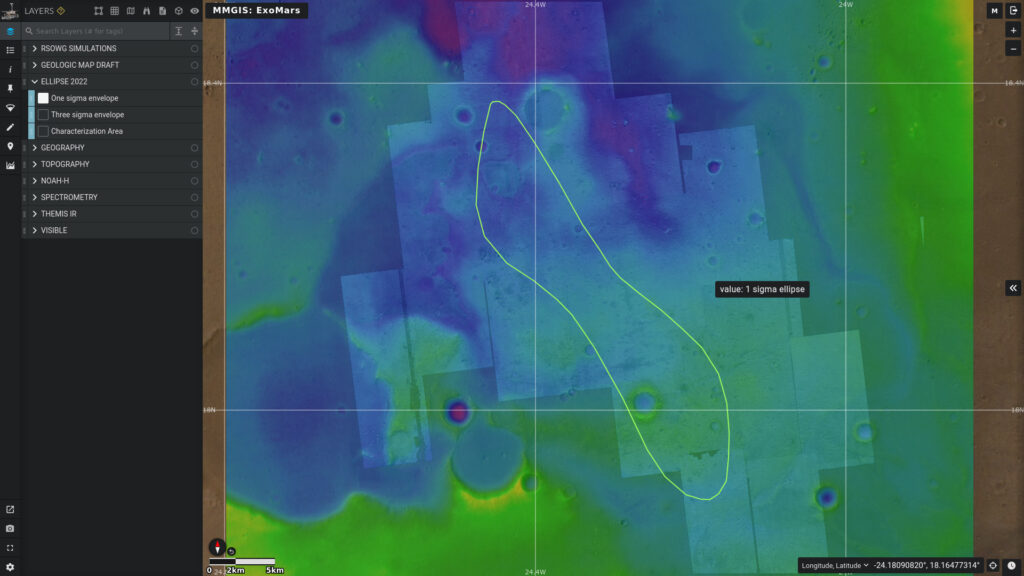
C’était la mission du groupe « Macro » de l’équipe scientifique d’Exomars. Matthieu Volat (Observatoire de Lyon) a pu faire profiter de son expérience et du système MarsSI pour fournir des modèles 3D de terrain et de l’imagerie rectifiée sur la base des caméras CTX et HiRISE de la mission satellite NASA MRO. Ces données ont été également complétée par des détections minérales issues des instruments OMEGA (mission Mars Express de l’ESA) et CRISM (MRO) issues du travail de Cathy Quantin-Nataf, Lu Pan, Lucia Mandon (LGLTPE durant ces travaux) et John Carter (IAS durant ces travaux), ainsi que de données CASSIS (mission ESA TGO) fournies par l’équipe CASSIS elle-même. Ces données collectées ont alimenté le système de données ESA MMGIS et ont permis la réalisation d’une analyse collaborative : plus de 100 chercheurs volontaires ont parcouru la zone atterrissage durant l’été 2020 pour en annoter les caractéristiques.
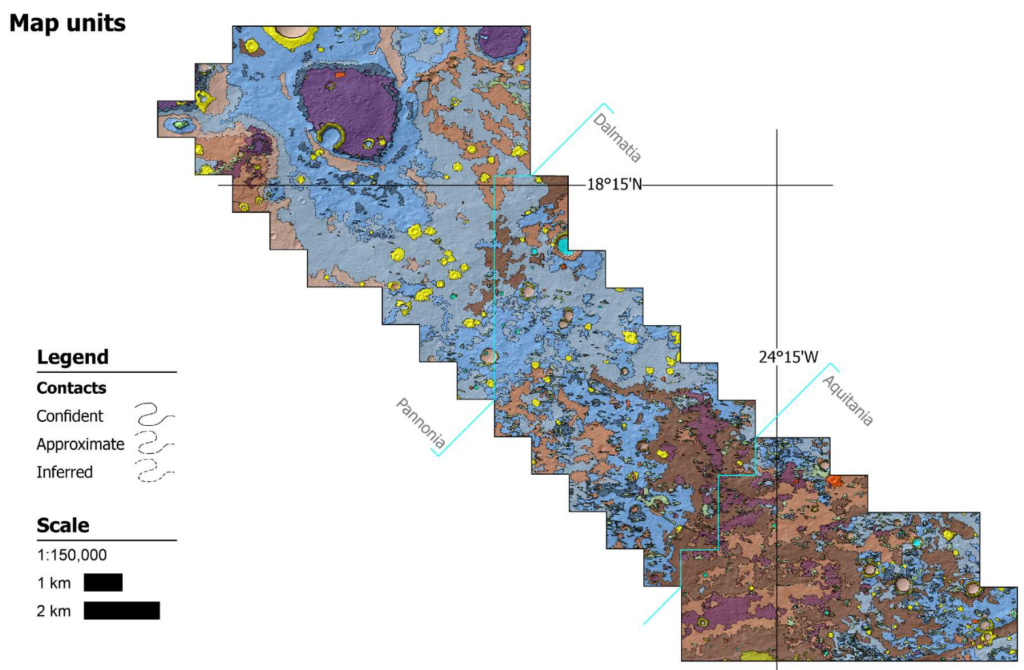
La dernière étape n’était pas la moindre : regrouper, parfois arbitrer et réconcilier le travail du groupe de cartographie. Cette tâche a été confiée à Peter Fawdon (Open University, UK) et Csillia Orgel (ESA) dont la carte finale de géologie d’Oxia Planum a été publiée dans le volume 20 de la revue « Journal of Maps » (https://www.tandfonline.com/doi/full/10.1080/17445647.2024.2302361).
Cette cartographie synthétise l’état d’analyse de la zone d’investigations potentielle prévue pour le rover Rosalind Fanklin, telles que les données orbitales nous le permettent. Mais il s’agit également d’une occasion d’avoir les attentions de nombreux experts sur une zone spécifique, permettant de confronter et confirmer les méthodes et analyses de la surface martienne.
Il ne s’agit néanmoins pas de la fin des analyses de données orbitales de cette zones, car d’autres types de données (par exemple radar) ou méthodes d’analyses seront certainement utilisées d’ici le lancement de la mission!